Please wait.
Please wait.
Individual project, Jan 2019 – Apr 2019
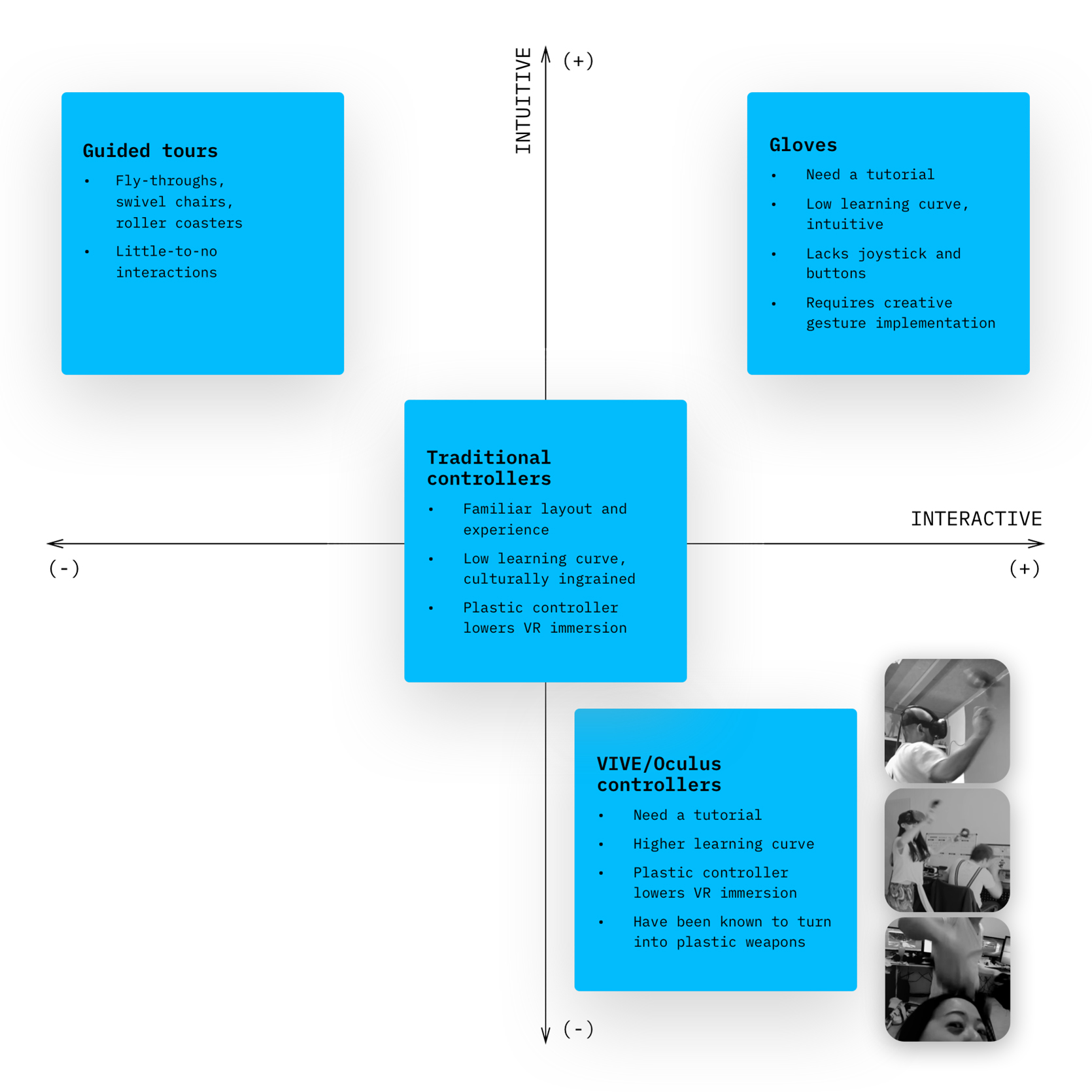

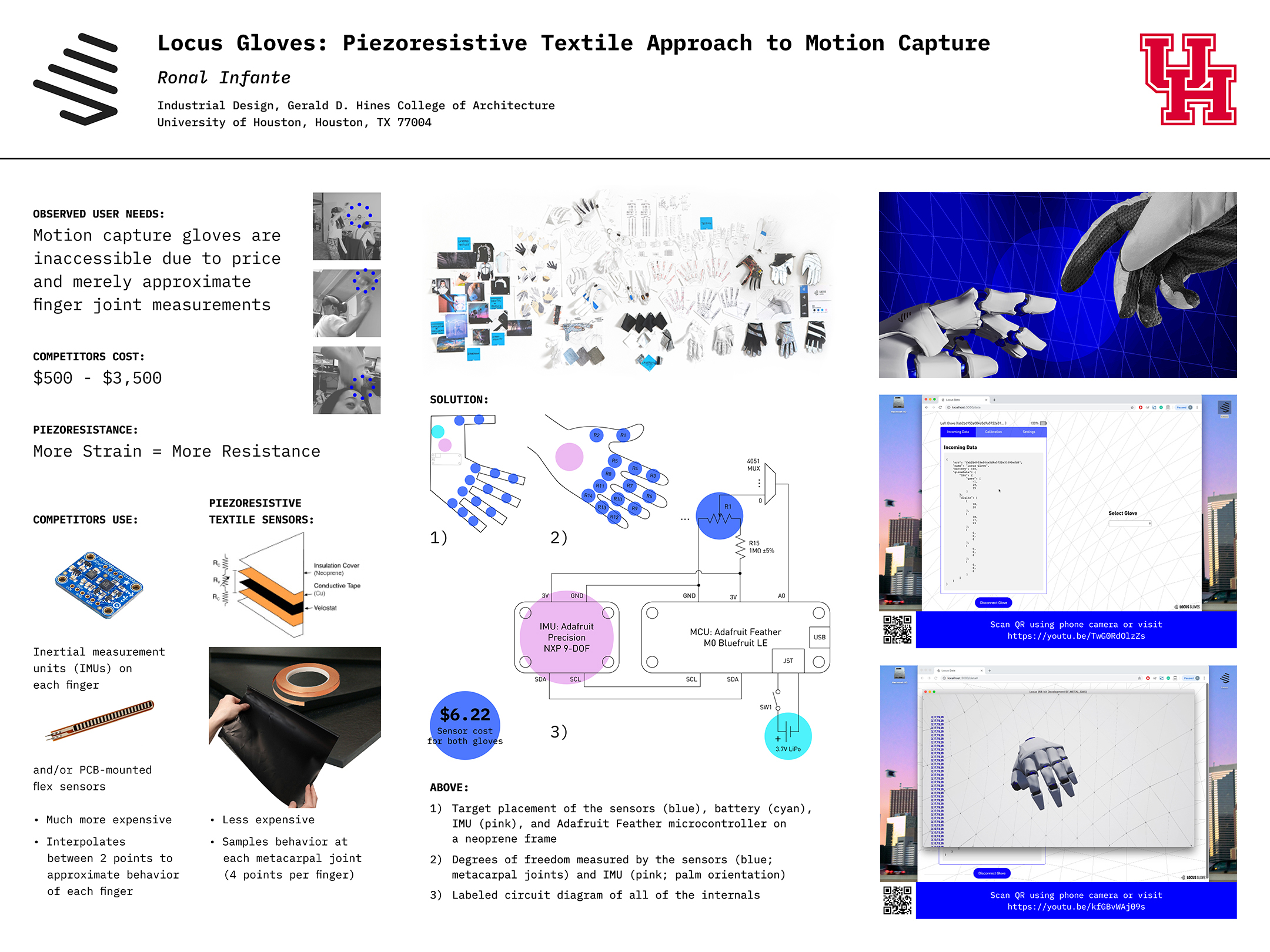
Gloves are both immersive and intuitive, making them ideal for diverse audiences. However, gloves on the market are expensive and merely approximate finger behavior. Piezoresistive textile sensors are a promising low-cost alternative to electronic sensors that may make gloves the preferred choice to control interactions in VR.

I was inspired by sporty and high-tech concepts and made cost-conscious fabric and form decisions accordingly.
Patterns were crafted from sketches for various concepts. Feedback on fit and fasteners guided my refinement.

The final prototype features a hood for the internals fastened by snaps that allows the customer to switch their glove design or replace their internals if needed, a radical departure from what is currently on the market.
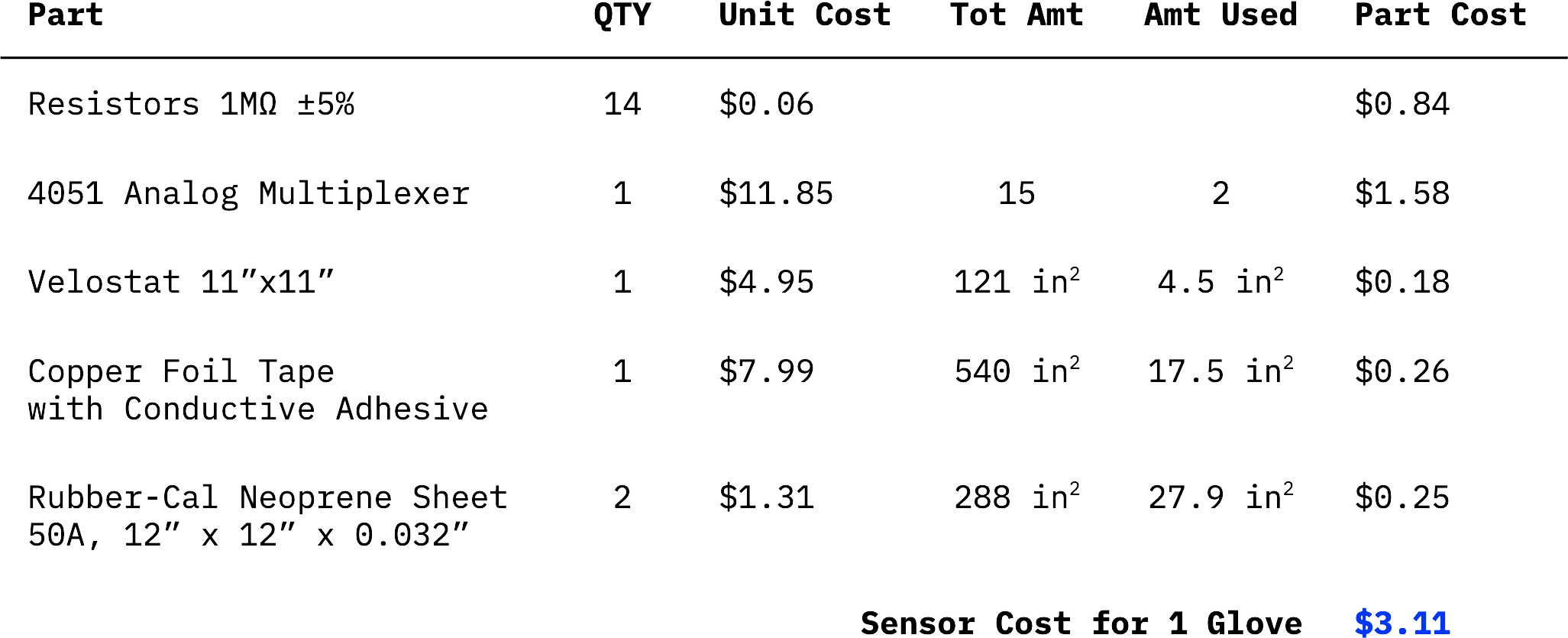
I made my own proof-of-concept piezoresistive textile sensors using neoprene, copper tape, and Velostat.
Using measurement data from Greiner’s 1991 publication, Hand anthropometry of US army personnel, each textile sensor was sized and placed at each metacarpal joint according to 5th percentile female and 95th percentile male data.
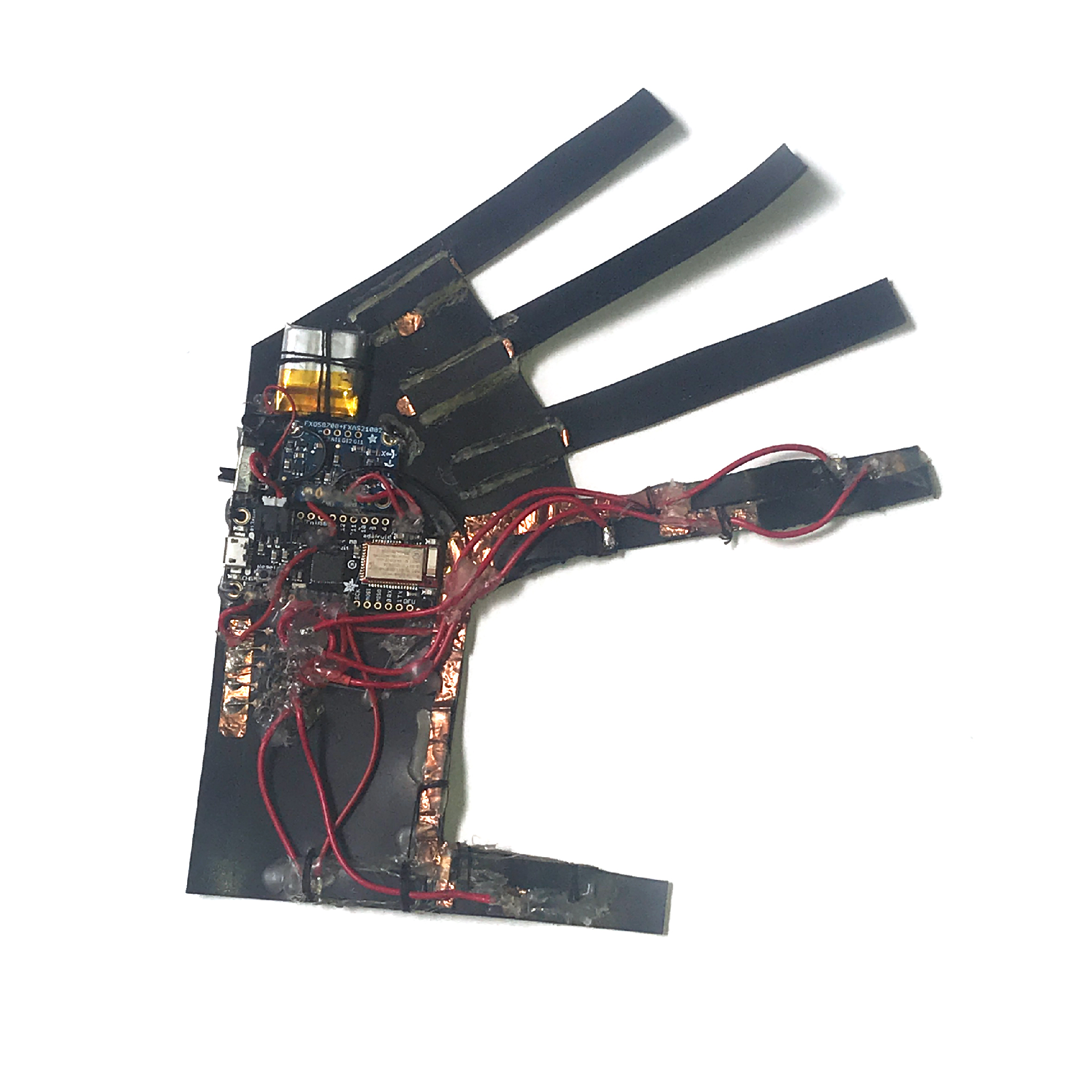
Functional, proof-of-concept prototype
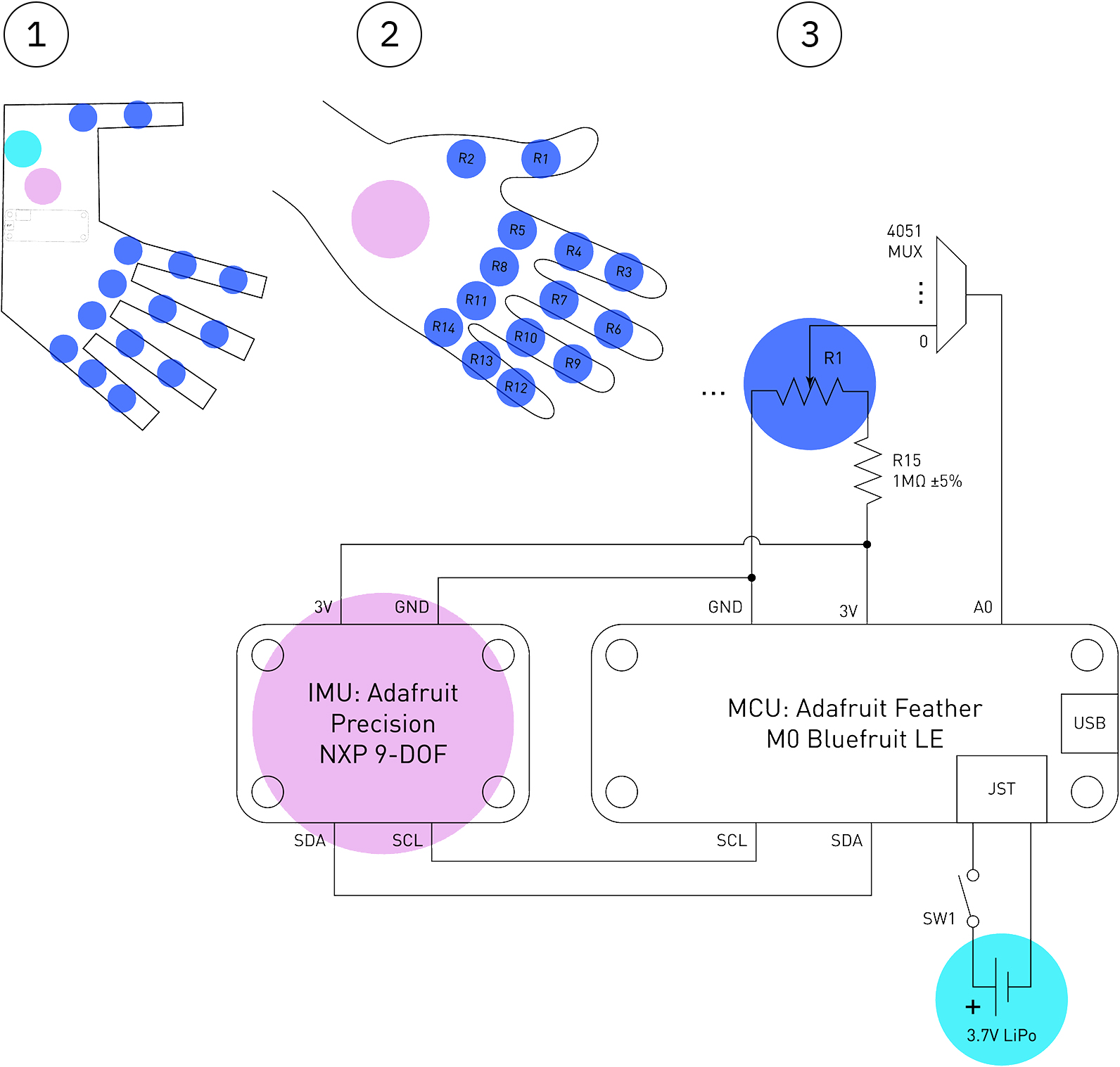
Circuit Diagram:

Sensor data is delivered using the Adafruit Feather’s GATT services over Bluetooth LE and received by a custom-coded Node.js server. The Locus Server features UI data binding, intuitive layouts, and adjustable settings.

The server formats and streams data over a user-designated port, which can be read by another software program. I developed a custom environment and a blueprint that controls skeletal mesh animations to model hand behaviors in virtual reality using Unreal Engine.